|
© Shine
May be used for private research only.
All other rights reserved
|
Preface
The
spring of 1983, marks the fiftieth year of
speculation concerning Loch Ness. In this
special composite report, the Project attempt
to put the record straight about various basic
aspects of the loch, drawing upon eight years
of fieldwork.
We
can hardly find the anniversary a cause for
celebration and mark the occasion with an
apology that the enigma remains. A short history
may help to explain why.
It
will be apparent that we are the most sceptical
of the investigators but, having established
that there is nothing impossible about "Loch
Ness Monsters" from a scientific point
of view, we feel that we owe it to the many
eye witnesses to follow the trail to the end.
Last
year, repeatable sonar contacts seem to confirm
those of other expeditions, particularly Birmingham
University in 1968. It should be possible
to discover what they might be.
Two
strong sonar targets on a paper trace obtained
at Loch Ness in 1982.
LOCH
NESS PROJECT REPORT
Loch
Ness & Morar Project
Request
for Volunteers
Fifty years ago in 1933, the
world was made aware of the possibility of
"monsters" in Loch Ness following
the road improvements along its north shore.
However, Highland folklore has long referred
to a "water horse" in several Scottish
lochs. Reports describe hump‑backed
animals, particularly in Loch Ness, Loch Morar
and off the west coast of Scotland.
Loch
Ness remains a large, scarcely explored, region
of the British Isles. Almost 23 miles long,
it could comfortably immerse every member
of the human race on earth three times over
and the London G.P.O. Tower would be submerged
by its 750 ft. depth. This exceeds the depth
of the seas surrounding our shores until clear
of the Continental Shelf. The loch is connected
to the sea via the short River Ness and was
once closer to sea level than it is today.
Though the deep waters are scarcely explored
biologically, we know the loch to be capable
of sustaining a population of quite large
animals. Finally; thousands of people since
1933 report seeing large animals.
Bearing
in mind the volume and persistence of eye
witness testimony, it seems only fair to investigate
at least until methods capable of resolving
the matter are applied. In the 1930s, a decade
before sonar and the aqualung, no such methods
existed and it was not until 1962 that organised
investigation began. Shore based surveillance
in the 1960s was discontinued having established
that the rare material produced was quite
inadequate scientifically, In the 70s passive
underwater photography was thwarted by peaty
water. Sonar, however, is more promising.
Teams from Oxford and Cambridge, Birmingham
University and Vickers Oceanics have all recorded
contacts of interest.
In
1982, the Project repeated these results.
Through the efforts of our volunteer members
we mounted day and night sonar patrols over
a four-month period and made no less than
forty contacts of interest. They were both
stronger and deeper than the known fish and
on occasions appeared to move. If there are
large animals present, then this is how they
would be recorded. Given the repeatability
of contact, it is now possible to move towards
resolving the matter of what they might be
and in future years this is the cause the
Project will be following.
This
will be achieved by, in addition to the mobile
patrols, establishing fixed stations to provide
more accurate tracking and plotting of target
movements. We shall also begin the active
deployment of underwater cameras, both T.V.
and stills, linked to sonar. Other work includes
a general scientific programme in collaboration
with Royal Holloway College, with emphasis
on life present in very deep water.
Volunteers
monitor the equipment in relays throughout
the 24 hours, either ashore or afloat. No
technical qualification is required; simply
the willingness to learn the simple procedures
and to work as part of a team. We recognise
that members are making their holiday time
available and the rota system allows "time
off' to explore the surrounding area.
To
cover expedition running costs, members contribute
a weekly sum (BP54 in 1983) which includes
all meals and accommodation, either in a tented
base camp or aboard chartered vessels. Applicants
should provide themselves with a sleeping
bag and waterproof clothing.
The
Project shall run continuously from a date
to be announced (usually early June). Applicants
should complete the form with this report
and enclose a deposit of BP30 per person/per
week, the balance to be paid on arrival. Joining
instructions will then be sent. The deposit
will be refunded immediately should a place
not be available. If contributions are to
be greater than BP54 per week, immediate notification
will be sent.
LOCH NESS PROJECT REPORT
A Case to Answer
Britain's
first freshwater biological station was established
at Lake Windermere in 1931. Net and jam jar
work was scarcely underway when in 1933, a
decade before sonar and the aqualung, the
world was confronted by "monsters"
in Loch Ness. Little was known about the loch,
save from Sir John Murray's Bathymetrical
Survey of the Scottish Lochs (1902-1908),
which though basically a sounding exercise,
included the first biological observations
to be made there. Fifty years passed before
the resumption of work as part of research
into the mystery.
Lack
of information on the deeper Scottish lochs
has laid the subject of the possible inhabitants
of Loch Ness open to varied speculation on
both sides of the controversy. The following
comments on aspects of relevance may help
to set the record straight.
Loch
Ness is a glaciated tectonic lake lying within
the Great Glen fault line. It is 35 km. long
and about 1.6 km. wide with steep sides sloping
to a flat bed, interrupted only by silt outfall
from the River Foyers, which divides the two
deep basins of 220m. depth. The maximum depth
of 230m. is considerably deeper than the seas
surrounding our shores and places Loch Ness
second in depth only to Loch Morar (310m.)
among British lakes. However, its fault line
origins give Loch Ness the greatest mean depth
of 130m.
All
these depths were determined by the Bathymetric
Survey using a Kelvin wire sounding machine
and the Project have always found them reliable.
They are disputed only by a sonar depth of
297 m. recorded by Vickers in 1969. A careful
search of the reported area by the Project
in 1979, using a Kelvin Hughes MS48 hydrographic
echo sounder calibrated on site in accordance
with survey practise, failed to find depths
greater than 220 m. A partial explanation
may lie in the fact that echo sounders calibrated
for seawater over‑read slightly in freshwater.
Echo
sounding is also responsible for an erroneous
impression given on chart traces that the
loch walls continue down 1,000 m. or so beneath
a loose sediment filling. The effect is known
as "side echoes" and a frequency of 10kHz.
or less is required for true sediment penetration.
Loch Ness is quite spectacular enough since
its volume of 7443 x 108 cu.m. is greater
than any other British lake and could comfortably
immerse every man, woman and child on earth
three times over. It must be agreed that there
is enough room to conceal a few mysteries
as well!
Clues
to how a species could have entered the loch
in the first place may be sought in post‑glacial
history. Ten thousand years ago the ice began
its last retreat from Loch Ness. Melt water
temporarily raised the sea level rendering
the loch more accessible. Subsequently, relieved
of the weight of ice, the land rose and the
loch level is currently 16 m. above sea level.
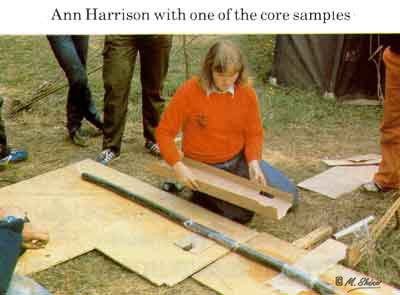
A
core sampling programme was mounted by the
Project to discover whether or not the sea
actually entered either Ness or Morar post‑glacially,
since silica cases of marine or freshwater
diatoms endure, locked in the sediment. Using
specially designed apparatus, 2m. cores were
extracted from Loch Morar (9m above sea level)
and 4 m. cores from Loch Ness. Clays are to
be found at the seaward end of both lochs
but their basins are covered with black lake
sediment to a depth of at least 4 m. in the
case of Loch Ness. A core from Morar was found
by Dr H.J.B. Birks of Cambridge University
to contain abundant cysts of marine algae,
providing good evidence for post-glacial invasion
by the sea. So far, no evidence of an actual
marine transgression has been found at Loch
Ness. Both lochs are, of course, still "connected
to the sea" via the rivers which drain
them. A 2m. Morar core is thought, on the
basis of pollen content, to have penetrated
over 5,500 years of sediments giving a good
idea of deposition rates, and, incidentally,
places theories of 1,000 m. of Loch Ness post‑glacial
sediment in perspective.
There
is no convincing foundation for speculations
concerning ancient constructions, since there
is no evidence that the loch level was ever
much lower than it is today, or of submerged
caverns, subterranean connections and the
like.
Next
in the consideration of the habitat comes
the food chain. It must be admitted that primary
productivity is low. High latitude and frequent
cloudiness reduce sunlight to a short growing
season. Photosynthesis is further limited
to a shallow photic zone of about 6 m. by
suspended peat. The hard rocks of a steep
catchment yield few nutrients to fast flowing
rivers entering the loch. Thus the phytoplankton
crop is low and the characteristic desmids
poor in variety. This limits the herbivorous
zooplankton (including Diaptomus Cyclops and
Daphnia sp.) and in turn the larger predators
(Leptodora, Polyphemus and Bythotrephes).
Bottom fauna consist mainly of insect larvae
and Pisidium (pea mussels). High acidity (pH6-6.5)
slows bacterial decay of organic particles
entering the loch and hence the release of
their nutrients. Rooted plants are restricted
to within a depth of 3 m. around the shore.
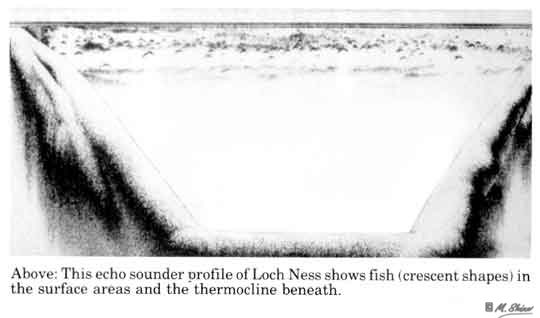
In
spite of all this, echo sounding reveals an
abundant fish population over the entire surface
area to a depth of at least 30m. The resident
fish consist of brown trout, char, eels, a
few pike and stickleback. Insects falling
into the water during the summer provide a
substantial proportion of the diet of trout.
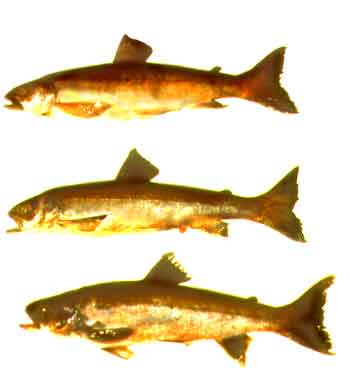
Quite
independent of primary productivity is the
influx of migratory salmonids prior to spawning.
Salmon and sea trout enter throughout the
year and may remain up to ten months before
spawning, during which time they do not feed.
Only during their first two years as parr
are they dependent on the food chain. Weighing
but a few ounces, they then leave and spend
one to five years at sea, before returning,
weighing up to fifty pounds. This must be
considered a great bonus to the food resources
available to any larger creatures.
Loch
Ness offers the compensation of stability
as a consequence of its low productivity.
The great body of water remains at a uniform
5.6oC throughout the winter preventing
the formation of ice. As summer advances,
a layer of warmer water (12oC at
the surface and falling with depth), termed
the epilimnion, separates from the hypolimnion
beneath, which remains at 5.6 oC.
The thermocline is the boundary layer of sharp
temperature change. In a lake, photosynthesis
is limited to the epilimnion, where the depletion
of nutrients cannot be replaced from the hypolimnion
until mixing occurs in winter. In productive
(eutrophic) lakes the decay of organic matter
falling from above, robs the hypolimnion of
oxygen to the detriment of life present there.
In less productive (oligotrophic) lakes such
as Loch Ness, the hypolimnion does not become
oxygen depleted. Therefore, the ologotrophic
nature of Loch Ness offers usable and stable
living space throughout the year. High oxygen
levels permit life to extend to the deepest
parts of both Ness and Morar.
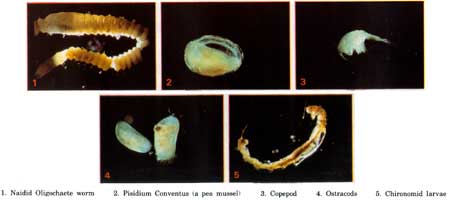
The
abyssal region of Loch Ness is inhibited by
a community of animals, illustrated by a recent
collection (Sept. 82) from the deep basin
floor, at a depth of 220m. The profundal benthos
live in a stable world of great pressure (22kg/sq.cm.),
unchanging low temperature (5.5oC)
and constant darkness. There is no shortage
of oxygen however. The species are typical
of lake beds but it is interesting to find
them at this depth. A similar collection was
made at Loch Morar at a depth of no less than
300m.
Pisidium
conventus, a tiny mollusc or 'pea-mussel'
is a relict of the loch's Ice Age past. It
is an arctic species and only found at these
latitudes, in the cold water of deep lakes
or at high altitudes.
Chironomids
are midge larvae. It is not known how, or
indeed if, they manage to reach the surface
and emerge as adults, through a water column
of a height greater than the London GPO Tower.
Some chironomids are known to be neotenous.
No less than 15 of the same species were taken
in a haul by a sampler which skimmed the mud
from an area of 0.1m2 .
Three
char were also taken from the loch bed at
220m., which deepest that fish have been caught in British freshwater. The Project
first observed fish on the loch bed in 1981,
with an underwater T.V. loaned by Tamtech
Ltd.
Char,
a salmonid, are another relict species and
known to swim deep. They are probably the
fish observed by echo sounder in the open
water, at a depth of 30-60m. In Windermere
they are known to feed on zooplankton and sometimes
chironomids.
So
far, it is not known whether char present
on the bed of Loch Ness feed on the bottom
fauna. Only one specimen contained matter
in the lower gut on capture. This consisted mainly of Bythotrephes, a large predatory
member of the zooplankton.
A
few observations on the condition of the deep
water sediments are also relevant to some
perennial theories explaining "monster"
sightings. Gas rising from the loch bed has
been recorded only in the shallower water
of Urquhart Bay. Here it is possible to provoke
the release of small gas bubbles by dragging
grapples or dropping boulders. The resulting
bubbles can be observed rising by echo sounder
but are seldom visible at the surface. The
mud of the deep water contains few gas producing
bacteria (Cambridge University 1962) and resists
all attempts to provoke gas by the means above.
Freshly extruded cores show no signs of gas
and nor does underwater television when towed
through the sediment.
Underwater
television, extensively used in the deep water,
has failed to reveal any rotting vegetation
or tree trunks. Logs are to be found in the
shallow waters, Urquhart Bay and, as would
be expected at Lochend and Dores, having drifted
with the prevailing wind. It is hoped that
no further speculation on alternative causes
of "monster sightings" shall visualise
Loch Ness as a stagnant pond.
On
the contrary, Loch Ness is a very large and
scarcely explored environment offering stable
conditions and, despite appearances, considerable
food resources. Most of the fish arrived from
the sea and many still migrate to and from
it. Access would once have been even easier.
The presence of a large fish predator is not
in the least surprising. The problem is that
people report seeing one they do not recognise.
Highland
folklore associates a "water horse"
with several Scottish lochs. Descriptions
of a hump‑backed, long‑necked
animal in Loch Ness, Loch Morar and off the
West Coast have been catalogued by Lt. Comdr.
Gould (The Loch Ness Monster and others 1934),
Mrs Constance Whyte (More Than A Legend 1957)
and investigations since. In spite of the
many causes of error, competently described
by Dr Maurice Burton (The Elusive Monster
1961), the volume and persistence of eye‑witness
testimony remains the most impressive category
of evidence. Agreeing that Loch Ness could
conceal and support large creatures, then
surely it is justified to inquire until means
capable of resolving the issue have been applied.
So far this has taken fifty years.
In
1933 there were no such means and by the time
there were, the subject had lost its credibility.
Loch Ness had become fair game for hoaxes
and authors plaintively demanding "scientific
investigation" were to become uncritical
in the presentation of evidence. Working on
the principal of the more the merrier, they
had succeeded only too well.
A
series of widely differing photographs have
appeared over the years and, in 1960, a film
of a moving object by Mr. T.K. Dinsdale. Encouraged
by these "classic" pictures, the
LNI (The Loch Ness Investigation, 1962‑72,
founded by David James and Peter Scott) mounted
intensive surface surveillance throughout
the sixties. After a ten year war of attrition
against the law of averages, the resulting
films of interest, brought realisation that
possible surfacings were rare, brief and exposed
little to useful photography. None showed
anything like the amount of body suggested by "the classics". Higher standards, introduced by Dr.
Roy Mackal, revealed how photographs could
be faked or mistakes made. The false trail
ended and the LNI moved underwater.
There
followed a most significant collaboration
between the LNI and Birmingham University,
which deployed a digital sector scanning sonar
in 1968. Results indicated objects moving
at speeds of 3.3m/s. horizontally and 0.5m/s.
vertically (Dr. Hugh Braithwaite, New Scientist,
December 19th, 1968). Sonar had previously
produced interesting results in 1962 when
used by an Oxford and
Cambridge University expedition (Dr.
Peter Baker, The Observer, August 26th, 1962).
Since then, Robert Love of the LNI, Klein
Associates and Partech Ltd. have also reported
successes. Unfortunately 1972 saw the cessation
of LNI activities.
In
the same year, underwater cameras suspended from moored boats in Urquhart Bay by
Dr.R.H. Rines, produced interesting photographs
which, when computer enhanced, appeared to show a flipper like object. Other pictures
followed in 1975. However, since they appear
to be interspersed with shots of loch bed
debris, they are inadmissible as evidence.
Peaty water at Loch Ness had rendered photographic
results ambiguous. Recognising these ambiguities,
the naming of the Loch Ness Monster, Nessiteras
rhombopteryx, by Rines and Sir Peter Scott
(Nature, Dec. 11th 1975), was based on wider
evidence and prompted by concern for conservation.
Meanwhile
in 1974, revived British effort had moved
to the clear waters of Loch Morar (which had
a similar sighting tradition established by
the Loch Morar Survey 1970-72), hoping to
solve the mystery at a stroke. The Loch Morar
Expeditions began with manned observation
equipment and progressed to underwater television
in 1975. The objective was to record a full
body profile by viewing upwards from beneath,
against the backlit 90 degree circle provided by the surface. In
1976, despite coverage a hundred times greater
than conventional flash photography (which
is limited by back scatter), no results occurred
in three months of work.
There
followed a reassessment of the situation.
Sonar made interesting contacts but could
not identify them directly. Passive underwater
photography had the potential to reveal essential
detail but the unpalatable fact was that it
could not be expected to make contact at all
without a much sounder basis for camera deployment.
The
Project (The Loch Ness and Morar Project which
had succeeded the Loch Morar Expeditions)
returned to sonar and to Loch Ness, since
its uniformity is more favourable to this
work. The objective was to repeat previous
sonar contacts and, in addition, to establish
some pattern leading perhaps to active underwater
photography. Hints to identity can also be
gleaned from sonar contacts, especially if
it is possible to track their movements.
Before
we could commence sonar monitoring it was
clear that a substantial and rather specialised
vessel was required. Patrols would be run
both day and night covering the length of
the 23 mile loch at slow speeds, as quietly
as possible. The sonar equipment would have
to be mounted in dry conditions and a crew
of six accommodated, allowing for relief shifts
during the 12 hr. period required to cover
the distance at drifting speeds. The vessel
should also be capable of supporting other
equipment rendered desirable as the work proceeded,
to launch and tow such equipment as cameras
and to act as a general work platform.
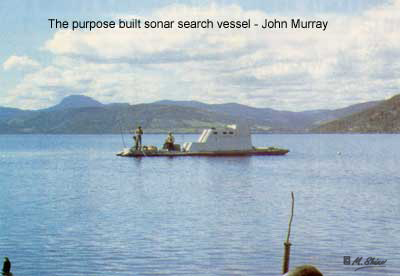
The
Project had already developed a usable surface
vessel system based upon 18 ft. inflatable
hull units linked by custom built deckings
on site. The sonar patrol vessel, "John
Murray", was built with twin 40 ft. hull
units and has a beam of 10 ft. These larger
tubes were decided on, rather than tandem
pairs of 18 ft units, in order to support
greater weight, to improve performance by
eliminating turbulence amidships and to give
some longitudinal strength to the structure.
Design
of the decking and superstructure had to allow
for dismantling and lifting by a crew of six
if necessary. Therefore the deckings were
built in 4 ft. sections (the width of a ply
sheet) which bolted together with the joints
sealed by mastic. Each section was framed
with 4" x 2" timber with 3/4"ply
sheets for the decks. Cabin sections are of
1/2" ply. Sections comprise 1) the foredeck,
2) the bridge, 3) and 4) cabin, 5) cockpit
and section 6) includes the whole of the after
deck with engine. Between sections 5 and 6,
just abaft the cabin, a gap was left to allow
the hull tubes to articulate thus avoiding
the need to build in longitudinal strength
sufficient for the whole length. The gap also
provides an obvious position for the lowering
of transducers. The whole deck is above the
water line so the mounting of new equipment
is easily arranged.
The
structure behaves quite well but is rather
heavy. A draught of approx. 1ft. (not allowing
for propeller and rudder), exposes the deck
joints to the waves underneath. Some trouble
was experienced in making these watertight.
The articulation certainly works but the motion
between the two halves is undesirable for
some purposes. For example, when towing a
T.V. camera close to the loch bed the camera
moves due to the effect of surface waves on
the towing vessel. It is hoped to produce
a light, fully rigid decking in aluminium.
The
catamaran form has the advantage that the
maximum beam and stability of the vessel is
maintained along the full length of the hull.
In a conventional boat it is customary to
handle heavy weights at the stern, since it
is here that the hull is often at its widest
and most stable. Working from the bow or off
the side, limits handling space and tends
to capsize the hull. Unfortunately, work from
the stern of most boats is complicated by
the rudder and propeller. In the case of a
catamaran, it is possible to use the bow for
these purposes while the engine may be safely
used for positioning. We therefore incorporated
a 10 ft. x 6 ft. foredeck. Since we also wished
to use the stern for lowering purposes, we
placed the propeller and rudder 3 ft. inboard
of the stern proper with a hatch for access
in the event of fouling gear. The aft working
platform extends over one third of the full
length to enable large equipment to be carried.
Since
the vessel is required to operate silently,
both under sail and while drifting, a special
characteristic is needed. Ordinarily, a vessel
not under power drifts uncontrollably, turning
its broadside to wind and sea, which is a
most uncomfortable position due to rolling.
Our craft is required to run steadily downwind.
To this end, the cabin structure is placed
well forward to catch the wind, pushing the
bow to leeward. To reinforce this tendency,
two 5 ft. dagger boards were provided aft
which gripped the water providing a fulcrum.
The system operated perfectly in practise
and we regard this as one of the most useful
features of the design. When under power and
heading upwind there can be, in consequence
of the forward superstructure, a tendency
for the bow to blow off course. This is compensated
for, by a further pair of dagger boards lowered
forward. In practise they were seldom needed.
Power
is provided by a 35 hp. Ford car engine, driving
a propeller through a conventional shaft held
in a special bracket. The four stroke system
allows operation at low revolutions without
oiling up as is the case of a two stroke.
The car engine is cheap, spares are readily
available and the mechanism and maintenance
are within the scope of a higher proportion
of our members than would be the case with
a more specialised engine. Speeds of over
6 knots are obtainable.
However,
the electrical systems are not so desirable
in a marine context and we would much prefer
a raising propeller to allow for beaching.
We had built a raising shaft but this would
have complicated the structure to an unacceptable
extent in the time available. A 24 volt lorry
alternator was fitted to the engine to provide
power for the sonar. Car batteries provide
storage for 200 amp.hr. to allow for drifts.
The system has suffered frequent breakdowns
and attention shall be paid both to propulsion
and charging, when funds permit.
The
rudder has a fairly large area (18" x
30"), is "balanced" and operated
by teleflex from the open bridge. The vessel
can turn within her own length.
Since
the loch runs NE to SW, it is in line with
the prevailing SW winds. NE and other winds
also tend to be channelled by the surrounding
hills to blow straight up or down the loch.
For this reason a square rig was decided upon
which would permit running downwind with the
minimum of adjustment. It is doubtful whether
the hull form would produce an acceptable
upwind performance with a fore and aft rig
and tacking would render systematic searching
difficult. Upwind work is performed under
power. Though the sail itself was ready for
the 1981 season, funds were not sufficient
to rig it. In fact a very acceptable performance
was obtained using the cabin windage alone.
As
already mentioned, placing the superstructure
forward allows a large working and transportation
deck aft and also orientates the vessel downwind
when drifting. The design of the cabin itself
was required to accommodate a crew of six,
the instrumentation and the control position
all in the smallest space and with minimum
weight.
An
open bridge was chosen for the control position.
An elevated deck, forward of the cabin proper,
gives a good view all round which is necessary
when equipment is being launched, towed or
recovered. It also gives direct contact with
work on the foredeck and affords the helmsman
a downward view when following up cables.
The bridge can be covered by an awning during
rain.
The
blacked‑out sonar compartment lies below
the starboard side of the bridge and it is
intended that a perspex panel in its roof
shall give the helmsman a view of the sonar
screen.
Steps
from the bridge lead to the cabin below, which
gives standing headroom and space for benches,
port and starboard. Two "quarter berths" run
out either side of a sheltered cockpit aft
and there is additional sleeping space between
the deck of the bridge. All berths are thus
clear of the cabin space and permit internal
changes to mount most equipment likely to
be used. When underway, the arrangements permits
two of the crew of six to stand down in the
quarter berths, while at anchor watch a third
may sleep beneath the bridge.
The
vessel is intended for 24 hr. use and during
1981 was "re-commissioned" every
12 hrs. Re-commissioning times were at 8 am
and 8 pm to coincide with main meals which
were eaten ashore. Additional food was supplied
in insulated containers and a small gas burner
provided for heating water.
We
believe that the combination of rotating manpower,
tented base camp accommodation and custom
built vessel, provide the key to true 24 hr.
operation and an economic standing sonar patrol.
There
were over 150 participants in the 1981 expedition,
including contingents from the W. Yorkshire
Fire Service Sailing Club, The Royal Corps
of Transport Sailing Club, Sea Cadets and
Venture Scouts.
The
construction of the vessel occupied most of
June and matters were then delayed for a further
month through the installation of faulty sonar.
Most of July was spent on an underwater T.V.
survey of a crashed Wellington bomber, in
collaboration with Herriot Watt University.
An unmanned, remote control submersible, "Sea
Pup", was used and our vessel proved
adequate to support it.
Throughout
August, 24 hr. operation was achieved. This
did much to show the potential of the sonar
system we had selected but also served to
demonstrate the importance of standard working
methods and fixed procedures. Contacts of
interest were gained but all were rated inconclusive.
During
the winter, we concentrated our attention
upon designing contact procedures and calibration
experiments. We also parted with tradition
and decided to charter vessels in 1982, until
funds permitted the improvement of our own
vessel.
In
1982, from the beginning of May to the end
of August, two scanning sonars were operated
for over 1,500 hrs. in day and night patrols
of the deep northern basin. Selection of the
deep midwaters as a starting point, was based
upon previously mentioned results, rather
than on initial biological considerations
which might have suggested the inshore waters
as more likely. In fact, the entire surface
area was found to be well stocked with fish.
Sonar work in midwater is easier and results
are less ambiguous. Inshore exercises were
attempted in Urquhart Bay but here, results
are confused by the loch bed, mooring chains
and boat wakes.
In
May and June, a Furuno 106A (150Khz, beam
width 9o) was operated from the
66 ft barge "Phyllis" and in July
and August, a Simrad SY (80Khz, beam width
11o) from a sonar equipped motor
cruiser "New Atlantis", made available
by Caley Cruisers Ltd, Inverness. The Skipper
603 echo sounder (50Khz., beam width 33o)
was used to establish general conditions.
The objective was to monitor contacts with
the following characteristics;
1. Deeper than the usual limit of the fish echoes
recorded during echo sounding, which has been
established to be 30 m. though may sometimes
extend to 60m.
2. Stronger than the usual trace produced by
fish.
3. Having movement (in this case vertical), not
normally associated with fish.
In establishing the lower depth limits of the
fish population, the Skipper 603 echo sounder
was used in a particular search for fish at
great depth. The machine was used with full
sensitivity and calibrated on a 3/4 lb. live
trout, which barely registered at depths below
150m. It seems reasonable to suppose that
fish significantly larger, are rare in the
mid waters at this depth. Alpine char, of
which three 1/2 lb specimens were taken from
the bed of the deep basin (approx. 220m) would
not register on the echo sounder at this depth.
Weak fish echoes (apparently equivalent to
the calibration fish) were occasionally gained
at depths of 60 in, but the bulk of the fish
population are concentrated above 20-30m.
and are abundant over the entire area of the
loch. We therefore established a rule whereby
contacts gained below 30m. were tracked.
The
relative strength of contacts was judged in
association with the above data and calibration.
The sensitivity of the scanning sonars was
reduced to the point where only the larger
fish registered in the surface layers. The
calibration fish was barely detectable at
25m. A further calibration using a 7.5"
spherical air volume was conducted with the
Furuno sonar, which has a colour display giving
a relative indication of target strength.
A
fixed mode of operation was used. The vessels
motored or drifted as near to the centre of
the basin as possible, between Foyers and
Urquhart Bay. The beam was normally scanned
over a sector of 120o in the direction of travel, at a tilt of 30o ‑40o
, giving an effective search to a depth of
160m. The course was corrected on the reception
of side echoes, which are clearly identifiable.
The range was set to 250m. with the loch bed
registering on the side lobe.
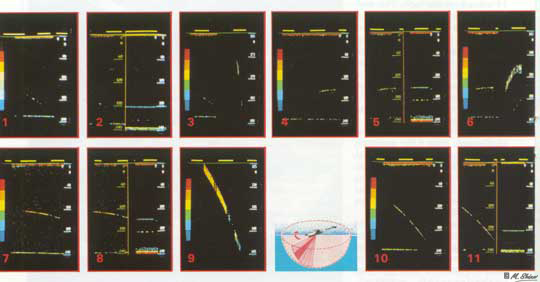
These
contacts (1,4,7,10) made with a Furuno 106A
sonar, are among those gained early in the
season, on May and June. The are presented
here since they introduce a new factor. The
presentation of contacts on a cathode screen
has the same function as on a paper trace
but the record is preserved on magnetic tape.
the main difference lies in the presentation
of these traces in colours related to their
strenghts. The colour scale to the left of
screen, shows strength declining at 3dB intervals,
with the strongest at red, to the weaker echoes
in the blues. With the traces presented, a
recorded calibration is included on the right-hand
side of the screen in pictures 2, 5,8 &
11. The calibration shows a 7.5 inch spherical
air volume (float) at an equal range to the
contact. Relative strengths may be judged
from the colour scale. Living tissue reflects
poorly, since it has a similar density to
water. In fish, over 50% of the echo comes
from the small, gas filled swim-bladder. In
air breathers, most of the reflection would
be from the lungs (normally nearly emptied
on diving). The calibration sphere is therefore
a very "strong" target.
For the first three contacts a third picture
(figure 3, 6, & 9) of the screen has been
included, in which the relevant portion of
the screen is expanded to cover the right
hand side.This shows more detail and is particularly
useful in differentiating single targets from
fish shoals, which exhibit diffuse "tails",
due to inter-reflections between individual
fish returning at slightly longer ranges.
The contacts appear to be single targets.
The sonar traces in 10 & 11 were obtained
off Urquhart Castle, in the deep 720 foot
basin, at 1725 on 16th May 1982. The target,
was of demonstrably greater strength than
the 7.5 inch calibration sphere to the right
and was tracked for a total of 68 seconds,
during which it appears to have dived from
69m to 114m (a speed of 0.8m/sec). Computations
are only accurate if the target is in the
centre of the beam and a safer measurement
is based on only the strongest parts of the
trace. However, this still indicates a vertical
movememnt of apprx. 30m with the target lost
at least a 100m (325ft) deep. We consider
this contact to be of great interest owing
to its strength, depth and probable movement.
Contacts
in excess of 50m. range (25-35 m. depth) were
considered of interest and tracked for as
long as possible, with the tilt angle noted
on the Simrad slave chart prefixed "T".
With the Furuno equipment, this information
was entered on magnetic tape; the recording
medium. Due to the inaccuracies of plotting
ship's movements, any estimates of contact
movements are confined to the vertical components
and are based upon depths of target when gained
and lost, together with tracking time (assuming
target at centre beam).
The
Furuno sonar secured 12 contacts and the Simrad
a further 28. They had consistent characteristics
and no other type of strong echo was observed
in midwater. The volume of contacts, compared
to previous sonar searches, is not significant
bearing in mind the operational hours which exceed those of all previous work put together (in deep water).
Most contacts were beneath the deepest detectable
layer of fish (60m.) but sometimes occurred
within it. On some days they seemed absent
from the area and then two or three detected
in the course of the next patrol.
The
contacts appear to be single targets and of
considerable strength, compared to the larger
identifiable fish echoes and to a 7.5"
spherical air volume. Some contacts appear
to show vertical movement, though more work
is required to show this conclusively due
to the short tracking times achieved. It may
be said that if there are large creatures
present, then this is how they would appear.
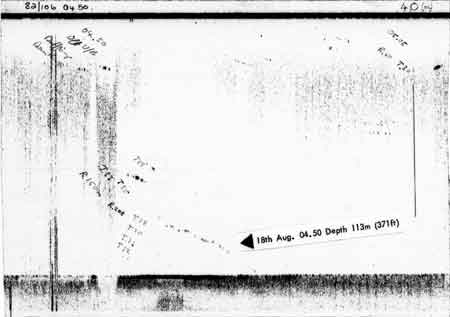
The
following paper traces record some of the
contacts made with a Simrad SY sonar in July
and August 1982. The earlier traces show contacts
significantly deeper than the scattered fish
near the surface. Later, sensitivity is reduced
and only the larger fish register, demonstrating
contact strength. Contacts are indicated by
arrows, giving date, time and depth. Depths
stated have taken into account the beam tilt,
which may be seen written on the charts, prefixed
"T". The loch bed is registered
by side lobes, not by the main beam.
Though care has been taken from the
outset, to eliminate alternative explanations
such as inanimate objects and freak side wall
returns, it is emphasised that pending specific
work it is impossible to absolutely discount
them. The importance of the results lies in
the repeatability achieved since it will now
be possible to resolve the nature of contact
one way or the other.
Adrian J Shine
Back
to the Archive Room